The Stereo Camera – A Cost-Efficient User Controlled Medical Instrument for Ophthalmic Use
ABSTRACT
Stereoscopy has always been a prevalent and significant aspect of ophthalmology because of its ability to accurately identify health problems faced by the patient. However, because ophthalmic instruments are expensive, developing countries often cannot afford these devices and opt for cheaper alternatives that produce distorted images. The solution I present is an in-house stereoscopic camera system that utilizes much more cost-efficient components, yet can still perform several of the necessary functions of ones on the market. The stereo camera consists of the Raspberry Pi and two Raspberry Pi camera modules. The entire camera is held together by 3D designed and printed adapters and is controlled by a graphical user interface, allowing for pictures and videos to be taken based on user command. The stereo images of the fundus produced by this camera are helpful in the identification of the gross anatomical structure of the fundus as well as in determining the cup to disc ratio, both of which are important in the detection of eye diseases. Our development is a cost-effective stereoscopic ophthalmic camera system maintaining adequate image resolution for ophthalmologists in developing countries seeking suitable technology at an affordable price.
INTRODUCTION.
Monoscopic images are very common amongst industries such as entertainment, but in the medical profession—specifically ophthalmology—they are heavily outclassed by stereoscopic imaging. By utilizing this system, the observer will be able to view fused images of the eye and recreate a sense of depth onto one single image [1]. This is especially relevant as abnormal morphology is often associated with disease and pathology, and the “sense of depth” possible from the stereoscopic feature of the camera allows for the detection of underlying ophthalmic diseases. Therefore, it is important that ophthalmologists have access to stereo vision during patient examinations because it would allow them to accurately identify problems experienced by the patient, without the fear of inaccurate observations from improperly distorted photographs, which can mislead clinical management [2].
Various instruments are used in stereoscopy, such as the Heine Omega 180 ophthalmoscope and binocular indirect ophthalmoscopy (BIO) lens, to ensure pictures of the fundus are as clear as possible [3]. The clarity of these images taken with the aforementioned instruments allows eye health care professionals to detect changes in the retina indicating diseases such as diabetes and high blood pressure [4]. Because of the necessity of the optical instruments in this system for both patient care and surgical cases, the equipment is often too sophisticated to be sold at a low price, averaging around $8000 per instrument [5]. Although cost efficiency is not the main concern in developed countries, the toll it takes on the world’s developing countries is detrimental, as their lack of affordability to regular and emergency eye care leads to severe health issues and in some cases death [6].
There are many past studies regarding stereoscopic camera systems that add to our knowledge of their significance in ophthalmology. An ophthalmic operation has been performed by surgical robots via smartphone-delivered stereoscopic visualization, where the vision allowed for the identification of the posterior capsule and the internal limiting membrane. Because this operation utilized stereoscopic camera systems, the surgeons were able to successfully conduct vitreoretinal treatments without looking directly into a microscope; the operation is a step forward towards tele-robotics where the surgeon doesn’t need to be physically present [7]. Another invention utilized a virtual reality headset acting as a head-mounted stereoscope, which resulted in excellent video quality and a visible stereoscopic effect [8]. Although both of the aforementioned studies were highly successful, the procedures required expensive high-quality microscopes for stereoscopic imaging, which limits its distribution to the developing world. Furthermore, stereoscopic photographs have proven to be a useful tool in the detection of glaucoma, a disease characterized by morphological change of the optic nerve and retinal nerve fibre. Because other factors such as nerve damage and visual function play significant roles in identifying the stage of glaucoma, its progression cannot simply be determined by pressure. However, the qualitative nature of the photographs is reliable enough that they can be used to monitor patients over long periods of time [9].
Instead of smartphone controlled surgical robots or 3D head-mounted displays, the newly designed stereo camera system utilizes both the Raspberry Pi and Raspberry Pi Camera Modules, both of which are controlled via user interface. The product is much more affordable in comparison to current stereo camera systems on the market as well as the ones mentioned in past studies. The cost effectiveness and availability of parts used in the system is significant in that it impactfully meets the needs of the developing world. Because the interface and adapter designs are already created, the assembly of the camera is relatively quick, allowing for efficient production and distribution of this prototype. Additionally, it is extremely difficult for low resource countries to import medical devices due to the continuous increase and imposition of tariffs, as exacerbated during the COVID-19 pandemic [10]. In contrast, this design is made in-house, allowing for the avoidance of the tariff issues and will shorten the time it takes for eye specialists to receive the product. The purpose of designing the stereo camera is to innovate a prototype that can be used to take stereoscopic photos and videos of the fundus in a low-cost fashion, aimed at providing better technology to ophthalmologists and consequently improve patient health around the world.
MATERIALS AND METHODS.
Structural Design.
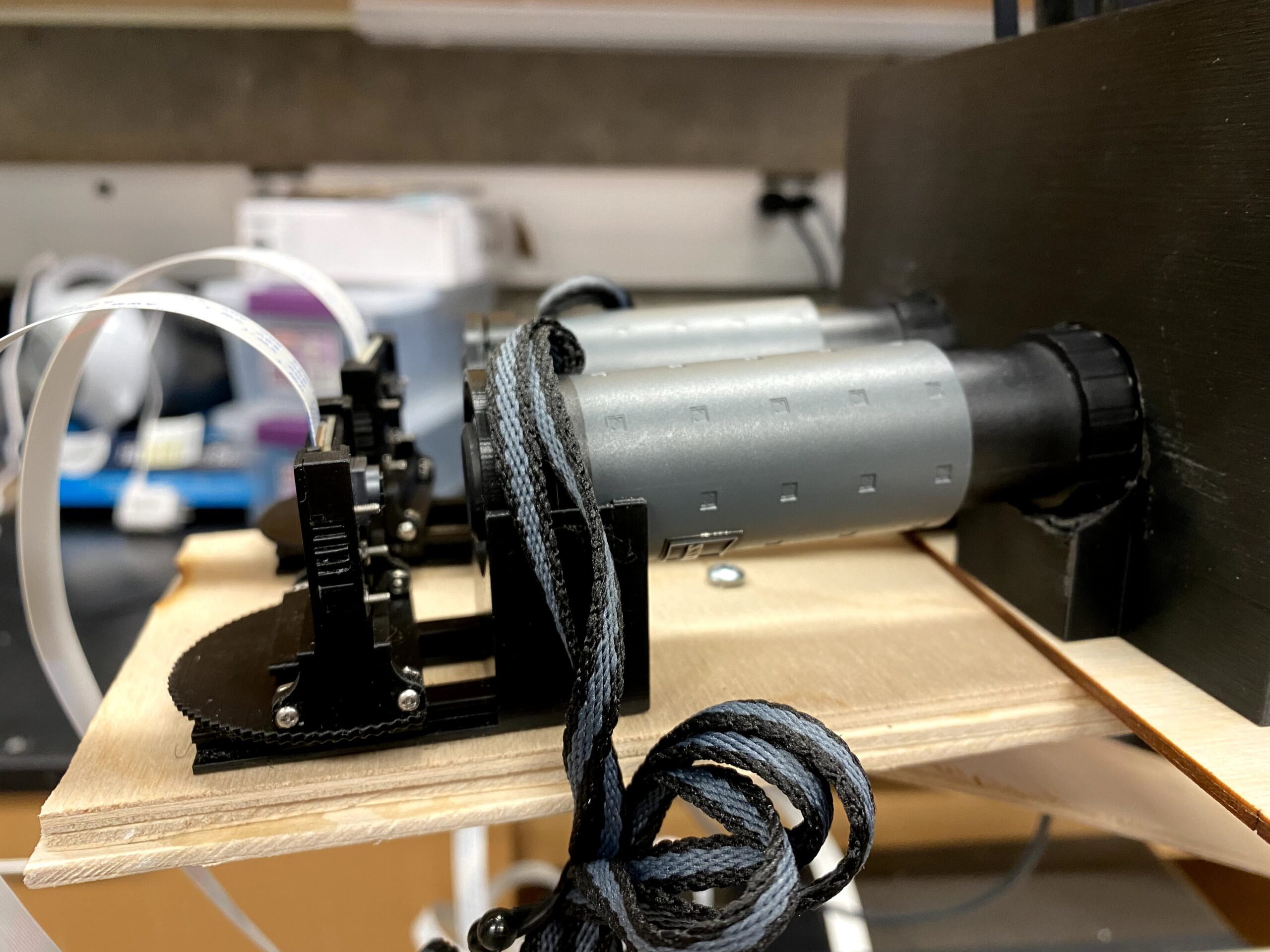
The design of the stereo camera (Fig. 1) starts with two Raspberry Pi Cameras, both of which are attached to a Zeiss 6×18 T monocular. Each monocular will be attached to the Heine Omega 180 Binocular Indirect Ophthalmoscope, and a set of BIO lenses will be placed on the other side. The entire design is held together by 6mm wooden dowels and three main sets of custom 3D printed adapters: an indirect ophthalmoscope holder, a lens holder & adapter, and a wooden dowel track stop design at the end preventing the lens from falling out. The lens holder is the larger piece that holds the lenses, and the lens adapter is a “C” shaped adapter that fits into the lens holder. Multiple adapters are created with different widths and are switched out accordingly to fit different lens sizes. Rare earth magnets are utilized in the lens holder design to ensure the lens is tightly secured and will not fall out.
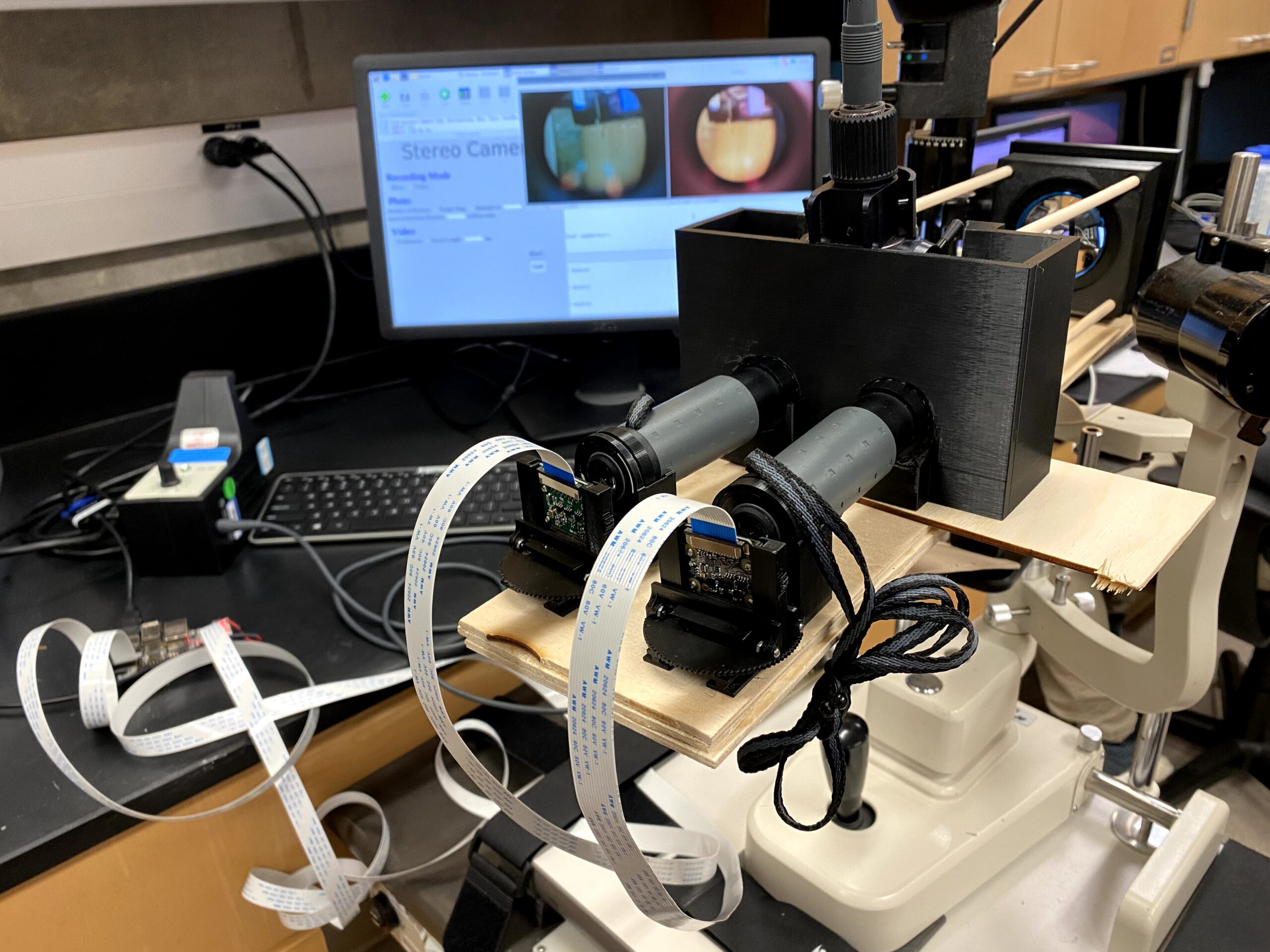
Figure 1. Stereo camera set-up with GUI
Hardware Design.
The stereo cameras are composed of two main pieces of hardware: the Raspberry Pi Compute Module 3+ and two Raspberry Pi Camera Modules: the Raspberry Pi NoIR Camera Module V2.1 and the Raspberry Pi Camera Board V1.3 (Supplemental Figure 1 & 2).
Software Design.
The operating system of the Raspberry Pi is Raspberry Pi OS Buster Version. The Python programming language was used to write the graphical user interface. Libraries installed on the Raspberry Pi were OpenCV version 3.4.2.16—allowing the camera frame to be read—as well as guizero, which was used to write the interface.
The graphical user interface (GUI) has options to take both photos and videos (Fig. 2). The ophthalmologist is able to choose the number of pictures as well as the intervals between each photo to get the desired number of photos needed. As for videos, they can either set up a video with a desired time interval or take photos via the live video feature.
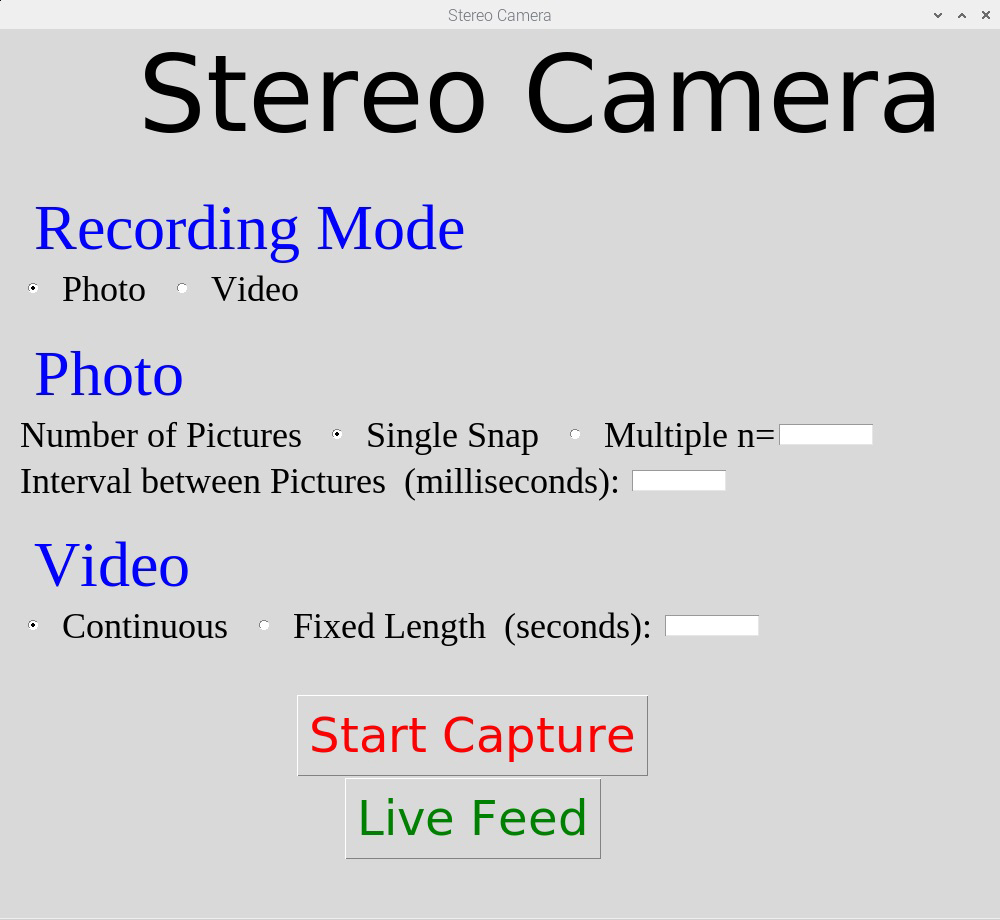
Figure 2. GUI with a live camera view function
RESULTS.
One of the options on the GUI is to open a live camera view. Once the ophthalmologist clicks the button labeled “Live Feed,” two windows will appear on the screen, each displaying a live video. Not only does this function allow for the successful view of live videos from the cameras, it also has the ability to take photos directly from this function by pressing the key “P” on the keyboard; the “P” key is short for print and is not key sensitive, meaning they can either press the lowercase or uppercase key to print the pictures. If the user wants to close off from this view, they can press the “esc” key, and the two videos will immediately close.
Besides opening a live camera view, the GUI can also simultaneously take two photos and videos at the same time. When taking photos, the user can select the quantity of photos they want as well as the specific interval between each photo. If the objective were to take a video, they can select either a continuous video or a video with a fixed length controlled by user input. After selecting a continuous video, the “start” button will change into a “stop” button in which pressing it will end the video and the file into a folder. All saved videos and photos have very specific names indicating if it was taken from the point of view of the first camera or second camera as well as the time it was taken. The time recorded goes from the year it was taken to the seconds, to ensure that all files are unique and easily identifiable.
Table 1 displays the cost of all components of the stereo camera, individually, as well as the total cost inclusive of the one-time purchase of a 3D printer and one without it. As shown, the cost without the printer is $2257, which is approximately a quarter of the average ophthalmic fundus camera price at $8012 [4].
Table 1. Overall cost of the design
| Component of the Stereo Camera | Cost |
| StereoPi (Raspberry Pi & Raspberry Pi Camera Modules) | $35 |
| Heine Omega 180 Binocular Indirect Ophthalmoscope | $980 |
| Zeiss 6×18 T Monocular (x2) | $370 |
| Binocular Indirect Ophthalmoscopy (BIO) Lens | $435 |
| 6 mm Wooden Dowels | $17 |
| Rare Earth Magnets | $7 |
| Original Prusa i3 MK3S 3D Printer | $749 |
| Hatchbox PLA 3D Printer Filament | $43 |
| Total | $3006 |
| Total (not inclusive of 3D printer) | $2257 |
Figure 3 displays two stereo images of the human fundus taken by each camera. The pictures clearly depict demarcated vessels and other anatomical structures such as the optic nerve head. Additionally, the cup to disc ratio can be measured based on these images, allowing ophthalmologists to follow disease progression. Lastly, one camera has regular unfiltered color, which otherwise means that the infrared wavelengths are cut out, whereas the other does not have IR wavelengths cut out. Eye professionals are able to use this advantage in camera differences in situations with light variations: the camera with IR wavelengths helps with lower light intensity situations and the NoIR camera is most suitable for regular lighting.
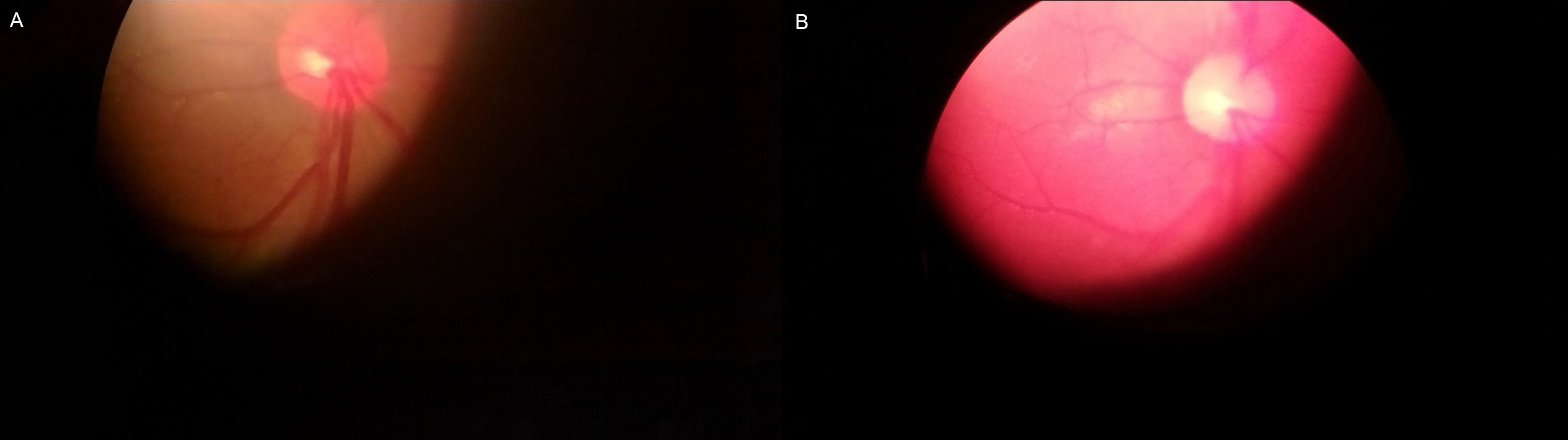
Figure 3. Stereoscopic fundus images that demonstrate stereoscopic imaging where (a) Fundus picture produced from camera 1 (b) Fundus picture produced from the NoIR camera 2
DISCUSSION.
Overall, the stereo camera was successful in its function and cost-effective in the making. Not only is the camera controlled by an in-house graphical user interface, but it also can be remotely accessed for teleophthalmology. The three sets of adapters met the engineering goals, as they were able to successfully hold the medical instruments in place and still allowed for the removal of these devices with ease. The total cost of the stereo camera is $2257 which is less costly and more affordable in comparison to stereo cameras of similar capabilities such as the Kowa Nonmyd WX-3D Simultaneous Stereoscopic Retinal Camera [11]. The in-house version of the stereo camera has already been tested on the human fundus, and the results produced are clear with the addition of depth lacking in regular monoscopic cameras.
Given the success of the GUI and its ability to display a live perspective and take pictures, the fundus images were taken with adequate image quality. Not only were the pictures taken by user command, they also maintained sufficient clarity. The anatomical structure of the fundus, as evaluated by a practicing ophthalmology retina specialist, had a cup to disk ratio of approximately 0.3 in both images, indicating anatomic disc normality. Although the optic nerve is well demarcated, the image taken from the no IR filter camera was less discernible than the color image. Nonetheless, the entire camera is cost-efficient and adequately meets the needs of developing countries.
Several design alterations had been made in the process. Because the lens adapters were not holding the lens tightly enough, we decided to add four rare earth magnets—one in each corner of the adapter—to keep the lens from slipping. Furthermore, wooden dowels were chosen to hold the camera system because of their superior performance under heat stress in comparison to aluminum rods, which are vulnerable to dimensional changes [12]. Therefore, the stereo camera can be delivered across the world without being affected by varying climates. However, wood is still affected by relative humidity (RH) levels, as it fluctuates to stay at equilibrium with the moisture content in the air [13].
Going forward, some modifications can be made to increase the capabilities and sophistication of the camera. For example, the multi-piece design can be changed to a singular piece, which would improve the structural integrity of the system and decrease the chances of compounding errors resulting from each joint interface. Additionally, more functions can be added to the GUI to increase video and photo quality, such as options to alter the shutter speed and ISO values. The addition of these functions will help with both aggressive auto-exposure and overexposure of the camera with no IR filter, which was a problem faced when taking the pictures. Picture quality can also be improved by using a camera with a larger sensor such as the HQ Raspberry Pi camera. Even though the regular Raspberry Pi camera modules met all of its expectations for its low price, investing in a slightly better camera with a bigger sensor will increase camera resolution and image quality, thus will better assist physicians and surgeons in making clinical decisions. Additionally, a new adapter for the indirect ophthalmoscope can be made. The original adapter for the instrument did not account for the complexity of the bumps and arches in the shape, as the design had a simple rectangular inside. Adding additional material on the inside to fill the space—unoccupied by the adapter—will help hold the ophthalmoscope more steadily in place and eliminate the occurrence of image distortion from a loosely-held instrument.
CONCLUSION.
Although there are a couple modifications that can make the prototype even better, the stereoscopic ability of the camera and its low price point make it sufficient in its purpose: to be delivered for ophthalmic use in developing countries. This camera was able to produce clear images of the fundus controlled by a user interface, allowing the user to choose either a picture or a video. This camera system represents a significant advancement in low-cost ophthalmic technology because of its suitability for regular eye care while still meeting the needs of ophthalmologists in low-resource settings.
PARTICIPANT CONSENT.
Participants provided written consent for the use of their images.
ACKNOWLEDGMENTS.
I would like to thank the University of California Irvine and Dr. Andrew Browne for giving me the opportunity to participate in their student research internship program. I would also like to thank Dr. Josiah To and Dr. Anderson Vu for mentoring me in the process.
SUPPORTING INFORMATION.
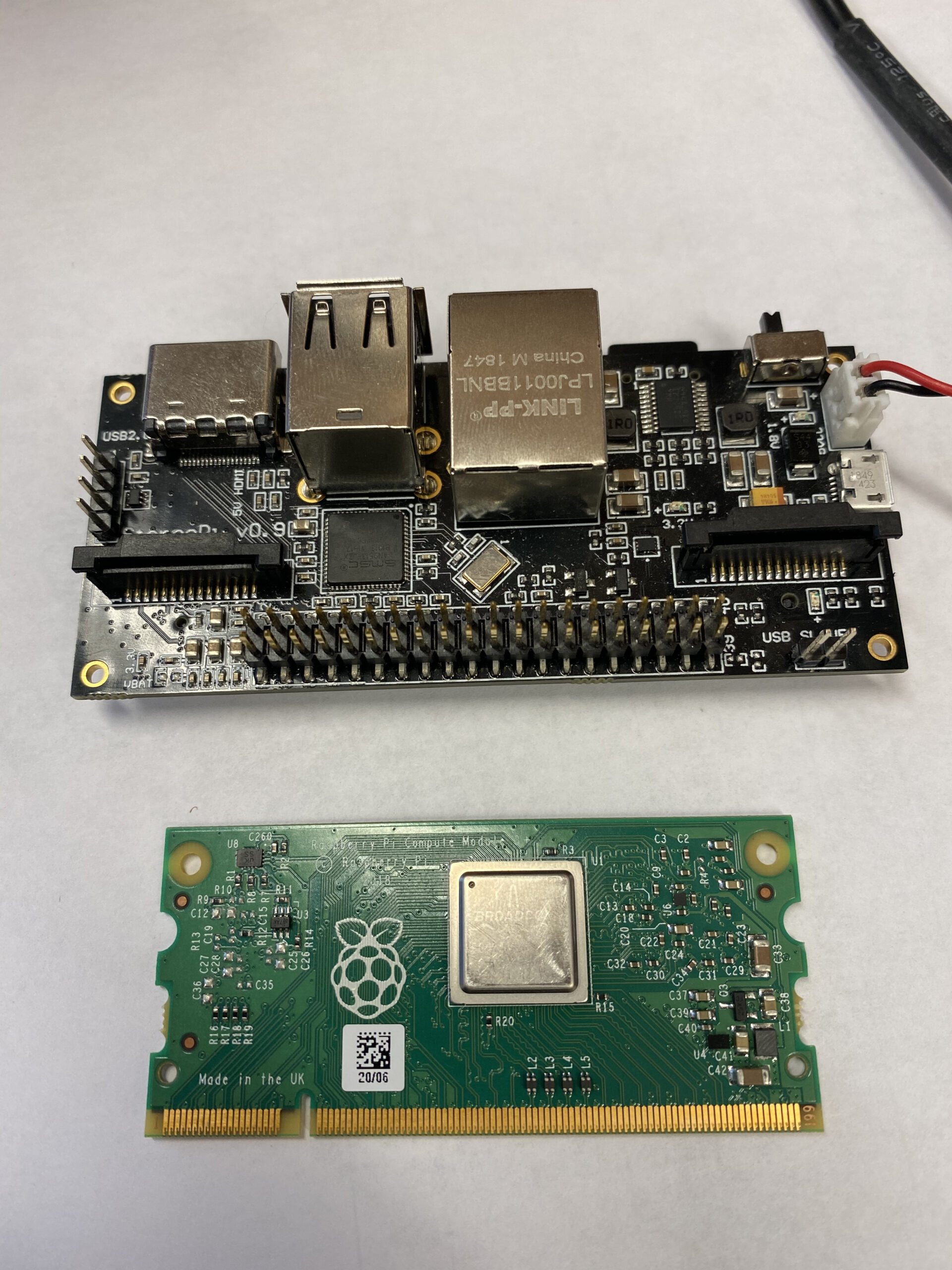
Supplemental Figure 1. StereoPi v0.9 Module which includes the Raspberry Pi and Raspberry Pi Stereo Camera Module
Supplemental Figure 2. Raspberry Pi Camera Modules and Monoculars
REFERENCES
- “Stereo imaging in ophthalmology,” The Royal Photographic Society [Online]. Available: https://rps.org/news/groups/medical/2020/stereo-imaging-in-ophthalmology
- Read, Stereo vision and strabismus. Eye 29, 214–224 (2015).
- Albert, J. Miller, D. Azar, B. Blodi, “Examination of the Retina: Ophthalmoscopy and Fundus Biomicroscopy” in Albert & Jakobiec’s Principles & Practice of Ophthalmology (Elsevier, 2008), ed. 3, ch. 3.
- “The eye test explained,” Hanson Opticians [Online]. Available: https://www.hansonopticians.co.uk/eye-health/the-eye-test-explained
- “Ophthalmology,” Medical Price [Online]. Available: https://www. medicalpriceonline.com/medical-equipment/ophthalmology
- Sommer, H. R. Taylor, et al, Challenges of ophthalmic care in the developing world. JAMA Ophthalmol 132, 640-644 (2014).
- K. Ho, Using smartphone-delivered stereoscopic vision in microsurgery: a feasibility study. Eye 33, 953–956 (2019).
- Gallagher, S. Jain, N, Okhravi, Making and viewing stereoscopic surgical videos with smartphones and virtual reality headset. Eye 30, 503–504 (2016).
- Oddone, Optic disc stereo-photography: Does it have a role in the OCT era. Ophthalmology Times. 14, 23-25 (2018).
- “Tariffs disrupted medical supplies critical to US coronavirus fight,” Peterson Institution for International Economics [Online]. Available: https://www.piie.com/research/piie-charts/tariffs-disrupted-medical-supplies-critical-us-coronavirus-fight
- “Kowa Nonmyd WX-3D Simultaneous Stereoscopic Retinal Camera from Kowa Optimed, Inc,” Ophthalmology Web [Online]. Available: https://www.ophthalmologyweb.com/5740-Digital-Retinal-Camera/55601-Kowa-nonmyd-WX-3D-Retinal-Camera/
- F. Czerwinski, Thermal Stability of Aluminum Alloys. Materials (Basel). 13, 15 (2020).
- M. Chanpet, N. Rakmak, N. Matan, C. Siripatana, Effect of air velocity, temperature, and relative humidity on drying kinetics of rubberwood. Heliyon. 6, 10 (2020).

Posted by John Lee on Thursday, May 20, 2021 in May 2021.
Tags: Affordability, Ophthalmology, Stereoscopy, Technology