The Biomechanics of Walking and Turning With a Split Toe Prosthesis versus a Single Toe Prosthesis
ABSTRACT
Each human toe exerts different forces onto the ground during walking and the inner most toes undergo more load, greater range-of-motion, and generate more power than the outer most toes. Yet, it is not known how the number of toes affects walking biomechanics. In this study, three subjects wore a pair of adjustable ankle-toe prostheses, mounted beneath simulator boots. Each subject experienced both a single and split toe during walking and turning. We examined motion capture, ground reaction forces, and a figure-of-eight turning test concurrent with a survey to analyze how the different toe conditions were perceived by each subject. We assessed toe joint angle range-of-motion and center-of-mass (COM) power and work for straight ahead walking, and qualitative differences in turning. It was found that there were no differences in toe joint angle or COM work during forward, treadmill walking. Additionally, we found that there were no differences in perceived balance while turning between a single or split toe, which was unexpected as previous research has indicated that different toes receive different forces, generate different amounts of power, and flex differently.
INTRODUCTION.
Attempts to mimic the human foot have led to a variety of different prostheses. These include the split foot prosthesis (carbon fiber prosthesis in which the medial (inner most) and lateral (outer most) sides are separated from the toe to the ankle by a space) that claims to improve medial/lateral stability [1]. However, these claims have not been substantiated by empirical research. A split foot emulator that has varied the amount of medial/lateral torque about an ankle showed that balance could be increased by using a stabilizing torque about an ankle, or a change in inversion/eversion torque of the ankle applied to counteract deviations in side-to-side (COM) acceleration during toe off [2].
Human toes have been studied for a better understanding of its biomechanical functions during gait. The evolution of the human foot has been suggested to better accommodate bipedal gait as the hallux (i.e., the big toe) transitioned form an opposable position to a non-opposable position. This transition of the hallux improved the walking economy by allowing for a more energy storage and return within the foot [3]. Furthermore, simulation studies have shown that the walking with a toe joint improves walking economy over walking without a toe joint [4–6]. Other studies of the human foot have shown that each human toe receives different ground reaction forces during gait [7] and that the medial toes of the foot undergo more load, flex more, and generate more power than the lateral toes [8].
Although toes have been suggested to contribute to walking performance, it is difficult to systematically test different features of toes. For instance, it is relatively simple to artificially increase the length of toes – but not decreasing the length. To circumvent these difficulties, previous studies have examined different toe parameters – including toe shape, toe joint stiffness [9], and toe length [10] – through an adjustable ankle-toe prosthesis. However, it is still unknown how the number of toes affects walking biomechanics.
MATERIALS AND METHODS.
An adjustable ankle-toe prosthesis with a single toe and split toe was evaluated in order to understand if the number of toes affect walking biomechanics. The split toe was drafted using computer aided design, then prototyped and manufactured using additive manufacturing. Three subjects walked and performed a turning test in simulator boots (VacoCast), air cast boots that disable the subject’s biological foot and ankle, that are attached atop the prosthesis. During walking, toe joint angle and COM power data were recorded. During the turning test, perceived balance data were collected.
Prototyping and Fabrication
A single toe and split toe were designed to fit the existing adjustable ankle-toe prosthesis [9] that allows for adjustment of different foot parameters (e.g., toe joint stiffness, toe shape, ankle stiffness). A preexisting toe of the adjustable ankle-toe prosthesis was replicated using a computer aided design program (Fusion 360, Autodesk Inc., San Rafael, CA). The toe was then updated so that a 0.25 cm gap was removed from the entire centerline of the toe (86 mm) to create the split toe. The split toe was additively manufactured using a solid fill (i.e., 3D printed with no honeycomb structure on the inside). A single toe was also additively manufactured to the same specifications to keep similar material and weight of the tested toes (split toe: 35 g, single toe: 37 g). Shoe crepe and Vibram were adhered to the toes via hook and loop in order to provide a shoe-like surface to walk on. The cantilever toe spring was also updated to accommodate the split toe. This spring was designed with a gap 0.13 cm wider than the gap of the split toe to ensure that the split toes would be able to move independently from each other (Figure 1). The toe spring was laser cut from 0.06 cm thick 1095 steel (also known as blue-tempered steel) to accommodate a stiffness similar to that previously tested [9].

Figure 1. Schematic of the adjustable ankle-toe prosthesis (a) with the top-views illustrating the design of the single toe (b) versus the split toe (c). Adapted figure from [9].
Data Collection
Data were collected from three able-bodied subjects (2 male and 1 female) with average weight, height, and age of 71± 15 kg, 1.8± 0.05 m tall, 25± 2 years, respectively. The subjects wore the adjustable ankle-toe prosthesis bilaterally below simulator boots in order to evaluate the difference between a single toe and split toe. All subjects recruited had prior experience walking on the adjustable ankle-toe prosthesis. Each subject provided written informed consent to the protocol prior to testing, which was approved by the Vanderbilt Institutional Review Board. The subjects had a twenty minute over-ground walking acclimation period. Time was split evenly between the following conditions: both split toe, neither split toe, only right split toe, and only left split toe. Sixteen passive reflective markers were attached (two at the top of each toe on the split toe, and to match on the single toe, one on the medial and lateral of the toe joint, and one on either side of the heel) to the prostheses. Markers were placed on the single toe to match the split toe. Subjects then walked on an instrumented split belt treadmill (Bertec, Columbus, OH) at 1.0 m/s while recording ground reaction forces and motion capture data (Vicon T40, Vicon, Oxford, UK) at 1000 Hz and 200 Hz, respectively. A two-minute acclimation period was given on the treadmill. Then two conditions, both feet with split toes and both feet with single toes (two more conditions are tested while turning, however due to time constraints they were not tested while walking), were each recorded for 30 seconds twice. Data were analyzed from the second 30 second trial.
A figure-of-eight test was used to characterize if subjects could feel the difference when walking on a split toe versus a single toe. Four conditions were tested each tested twice: both split toes, both single toes, a split toe on the right and a single toe on the left, and a split toe on the left and a single toe on the right. A Likert-scale survey [11], which is a survey in which a subject is asked to rate to what extent they agree with the given statement on a five-point scale, from strongly agree to strongly disagree, was given to subjects after each random condition was tested while turning. Subjects walked in a figure eight pattern two times for each condition [12], then were asked to rate to what extent they agreed with the statement “I felt more balanced making a turn to my left as compared to making a turn to my right” on a five point Likert-scale. While the condition was being changed between each test, subjects were given an android tablet loaded with the game “Fish Farts Kids” [13] to distract subjects from what condition was being applied for the next trial. Video recordings were also taken of the first subject while walking and turning.
Data Analysis
The data were processed using a custom MATLAB (MathWorks, Natick, MA) script in combination with Visual 3D (C-Motion, Germantown, MD). Marker and force data were filtered with a Butterworth 3rd order, dual pass filter at 10 Hz and 15 Hz, respectively. All data were stride parsed and averaged based on foot contact. Cross-over steps (e.g., right foot on left belt) were eliminated prior to stride averaging. Marker data were used to determine toe joint angles for both the medial and lateral toes. Force data were used to compute COM power (Figure S1) using the individual limbs method [14]. The work during different phases of gait was determined from area under the time-varying COM power curve [15]. The four phases of gait evaluated were Collision, Rebound, Pre-load, and Push-off, as defined by the COM power curve and were formally defined in Zelik et al. (2015). Though all phases of gait were evaluated, we a focused on the Push-off and Collision phases, because as the toes articulate during Push-off, and Collision occurs simultaneously as Push-off on the opposite limb.
Statistical tests were used to determine significant differences between toe joint angles (Figure S2), work in each phase of gait (Figure S1), and survey response (Table 1). An analysis of variance (ANOVA) with a Holm-Sidak correction was used to determine if there were any significant differences between the whole toe joints’ range-of-motion, the medial toe joints’ range-of-motion and the lateral toe joints’ range-of-motion angles when α = 0.05. A paired t-test was used to determine significant differences between the single toe and split toe trials for each phase of gait. A Kruskal-Wallis test was used to determine if there were any significant differences in survey response across conditions when α = 0.05.
Table 1. Percentage response for each condition. Implications for each choice response on Likert-scale survey are listed. No significant differences were found (p > 0.05).
| Left turn is more balanced | No difference | Right turn is more balanced | |
| Left Split Toe | 0% | 83% | 17% |
| Right Split Toe | 17% | 67% | 17% |
| Neither Split Toes | 0% | 83% | 17% |
| Both Split Toes | 0% | 83% | 17% |
RESULTS.
Straight-Ahead Walking
Walking with a single toe or split toe made little difference in toe joint range-of-motion (Figure 2) or in COM work (Figure 3). No significant differences were found in the range-of-motion nor in the COM work during different phases of gait (p > 0.05).

Figure 2. Average (N=3) range-of-motion for the lateral and medial toe joints during the split toe trials and whole toe joint during the single toe trials. No significant differences were found (p > 0.05). Bars represent standard deviation.
Figure 3. Center-of-Mass Power curve and average (N=3) work for each phase of gait for the split toe and single toe trials. No significant differences were found in a single toe versus split toe trial (p > 0.05). Bars represent standard deviation
Turning
Overall, there was little perceived difference between having a single toe and a split toe during turning (Table 1). Two out of the three subjects reported no differences between conditions, while one subject reported feeling differences more frequently on the right foot than the left foot. However, there were no significant differences between responses (p > 0.05).
DISCUSSION.
This study evaluated how the number of toes affected walking biomechanics. This was the first study to isolate the function of a single toe versus a split toe on a prosthesis. There were no noticeable differences between the single toe and split toe while turning (Table 1), which was unexpected as medial and lateral human toes do not undergo the same load, flex the same amount, or generate the same amount of power as each other [7, 8]. Though there was no perceived differences in these conditions during turning, video recordings showed that each toe hit the ground at different times and went through different ranges of motion. Further investigations with motion capture (as motion capture was not recorded during these tasks) will be needed to corroborate this evidence. Furthermore, one subject felt differences that did not coincide with the given conditions. The cause of these perceived changes is unknown but could be due to a placebo effect. Collection of ground reaction forces could provide further objective evidence to either confirm or refute the subjective findings here. Motion capture and ground reaction force data were not collected here due to study time and space constraints (i.e., would require force plates over a great area).
During forward walking, there were no differences between the single toe and split toe in toe joint angle (Figure 2) or COM work (Figure 3). These results were expected as previous studies have shown that the shape of the toe, including only having a single toe on either the medial or lateral side of the foot did not affect walking biomechanics [9].
There are several limitations to this study. The most pronounced limitation of this study is that it was performed using simulator boots that cause the subject’s gait to deviate from natural gait, however this is common for testing prosthetic foot parameters [9, 16]. This study’s sample size was also small as it was only three people. The power analysis for this study showed that the sample size needed for a power of 0.9 when alpha = 0.05 is over 500. A 500+ subject study is not feasible in research similar to this due to the amount of time each individual data collection takes and the cost of having 500 subjects. Ideally, a study like this would have ten to twenty subjects, as most studies in this field do [9, 16]. Additionally, the prosthesis used in this study has a single axis ankle and a single axis toe joint, though multi-axis ankle joints are available [17]. Both of these could have an effect on how the subjects perceived differences in the toes, as having a single axis ankle and toe joint is dissimilar to the biological foot that the subjects regularly walk on.
In conclusion, there were no significant differences between the range of the toe joint angle, or the Center-of-Mass work while walking or perceived differences while turning with a single toe versus a split toe explicitly quantified in this study. However, data of other biomechanical functions is needed to confirm or deny if the number of toes affect walking and turning. Ideally, this study would be repeated with additional subjects and more objective testing to better understanding the function of toes while walking and turning.
ACKNOWLEDGMENTS.
Thank you to the Zelik Lab for Biomechanics and Assistive Technology and the School for Science and Math at Vanderbilt.
SUPPORTING INFORMATION.
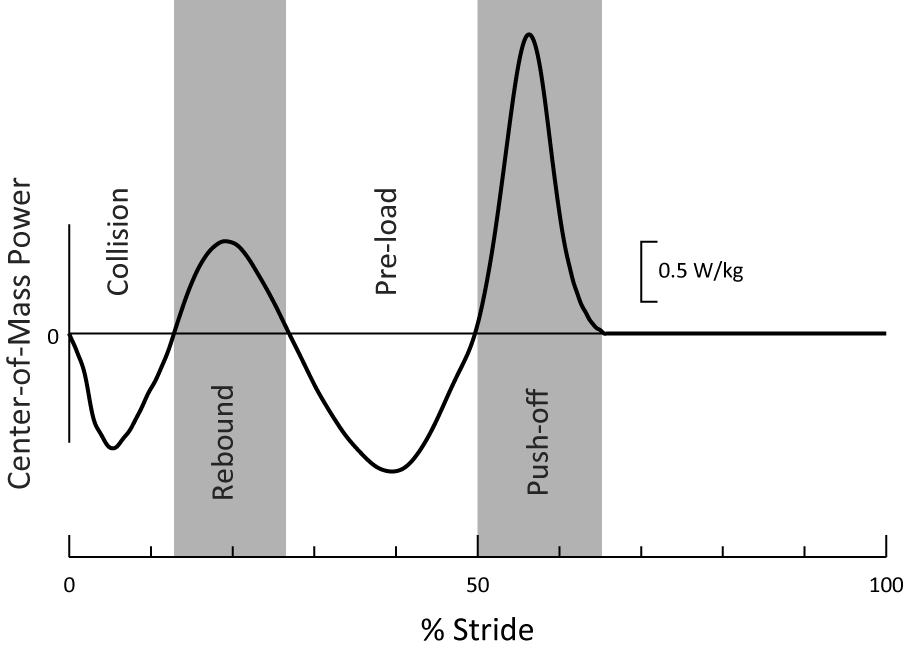
Figure S1. Center-of-Mass Power over percent of single stride. Each phase of gait coincides with each peak and valet in the Center-of-Mass Power. The work of each phase of gait is the area under of above each curve.
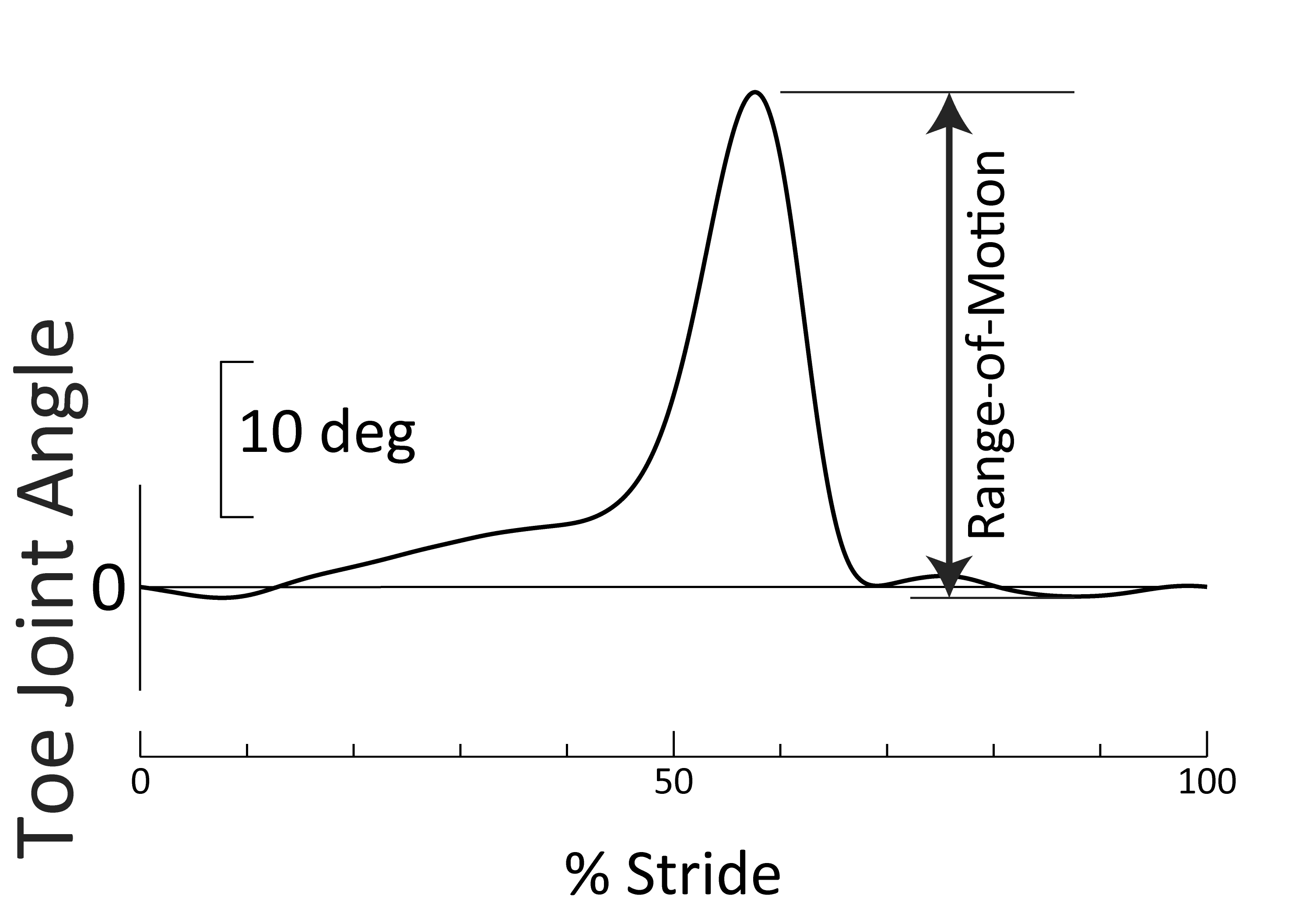
Figure S2. The range-of-motion is derived from the toe joint angle over the length of a single stride.
REFERENCES
- V. Phillips, Split foot prosthesis (1998), (available at https://patents.google.com/patent/US6071313A/en).
- M. Kim, S. H. Collins, Step-to-Step Ankle Inversion/Eversion Torque Modulation Can Reduce Effort Associated with Balance. Front. Neurorobot. 11 (2017), doi:10.3389/fnbot.2017.00062.
- N. B. Holowka, D. E. Lieberman, Rethinking the evolution of the human foot: insights from experimental research. Journal of Experimental Biology. 221, jeb174425 (2018).
- R. P. Kumar, J. Yoon, Christiand, G. Kim, The simplest passive dynamic walking model with toed feet: a parametric study. Robotica; Cambridge. 27, 701–713 (2009).
- Y. Huang, Q.-N. Wang, Y. Gao, G.-M. Xie, Modeling and analysis of passive dynamic bipedal walking with segmented feet and compliant joints. Acta Mech Sin. 28, 1457–1465 (2012).
- Y. Huang, B. Chen, Q. Wang, K. Wei, L. Wang, in 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (2010), pp. 4077–4082.
- J. Hughes, P. Clark, L. Klenerman, The importance of the toes in walking. The Journal of Bone and Joint Surgery. British volume. 72-B, 245–251 (1990).
- B. A. MacWilliams, M. Cowley, D. E. Nicholson, Foot kinematics and kinetics during adolescent gait. Gait & Posture. 17, 214–224 (2003).
- E. C. Honert, G. Bastas, K. E. Zelik, Effect of toe joint stiffness and toe shape on walking biomechanics. Bioinspiration & Biomimetics (2018).
- E. C. Honert, G. Bastas, K. E. Zelik, Isolating effects of toe and foot length on bipedal walking, 42nd Annual Meeting of the American Society of Biomechanics, Rochester, MN, USA (2018).
- R. Likert, A Technique for Measurement of Attitudes. Archives of Psychology. 22, 1 (1932).
- G. Johansson, G.-B. Jarnlo, Balance training in 70-year-old women. Physiotherapy Theory and Practice. 7, 121–125 (1991).
- Kansys Apps, FishFarts Kids – Apps on Google Play (2011), (available at https://play.google.com/store/apps/details?id=com.kansysapps.fishfartskids&hl=en_US).
- J. M. Donelan, R. Kram, A. D. Kuo, Simultaneous positive and negative external mechanical work in human walking. Journal of Biomechanics. 35, 117–124 (2002).
- K. E. Zelik, K. Z. Takahashi, G. S. Sawicki, Six degree-of-freedom analysis of hip, knee, ankle and foot provides updated understanding of biomechanical work during human walking. Journal of Experimental Biology. 218, 876–886 (2015).
- K. E. Zelik et al., Systematic variation of prosthetic foot spring affects center-of-mass mechanics and metabolic cost during walking. IEEE Trans Neural Syst Rehabil Eng. 19, 411–419 (2011).
- J. Martin, A. Pollock, J. Hettinger, Microprocessor Lower Limb Prosthetics: Review of Current State of the Art, JPO Journal of Prosthetics and Orthotics. 22, 183–193 (2010).
Posted by John Lee on Tuesday, December 22, 2020 in May 2019.
Tags: Biomechanics, Prostheses, Toes